
Потери мощности и коэффициент полезного действия машин постоянного тока

В машинах постоянного тока при работе происходит потеря энергии, которая складывается из трех составляющих.
Первой составляющейявляются потери в стали Рст на гистерезис и вихревые токи, возникающие в сердечнике якоря. При вращении якоря машины сталь его сердечника непрерывно перемагничивается. На ее перемагничивание затрачивается мощность, называемая потерями на гистерезис.
Одновременно при вращении якоря в магнитном поле в сердечнике его индуктируются вихревые токи. Потери на гистерезис и вихревые токи, называемые потерями в стали, обращаются в тепло и нагревают сердечник якоря.
Потери в стали зависят от магнитной индукции и частоты перемагничивания сердечника якоря.
Магнитная индукция определяет эдс машины или, иначе, напряжение, а частота перемагничивания зависит от частоты вращения якоря. Поэтому при работе машины постоянного тока в режиме генератора или двигателя потери в стали будут постоянными, не зависящими от нагрузки, если напряжение на зажимах якоря и частота его вращения постоянны.
Ковторой составляющей относятся потери энергии на нагревание проводов обмоток возбуждения и якоря проходящими по ним токами, называемые потерями в меди, – Робм.
Потери в обмотке якоря и в щеточных контактах зависят от тока в якоре, т. е. являются переменными – меняются при изменениях нагрузки.
Третья составляющая – механические потери Рмех, представляющие собой потери энергии на трение в подшипниках, трение вращающихся частей о воздух и щеток о коллектор. Эти потери зависят от частоты вращения якоря машины. Поэтому механические потери также постоянны, не зависят от нагрузки.
Кпд машины в процентах:
= P2/P1 x 100%
гдеР2 – полезная мощность; Р1 – потребляемая машиной мощность.
При работе машины генератором полезная мощность P2 = UI,
где U – напряжение на зажимах генератора; I – ток в нагрузке.
Потребляемая мощность
P1 = P2 + Pст + Pобм + Pмех = UI + Pст + Pобм + Pмех
и кпд = (UI/(UI + Pст + Pобм + Pмех)) x 100%.
При работе машины двигателем потребляемая мощность
P1 = UI,
где U– напряжение питающей сети;I – ток, потребляемый двигателем из сети.
Полезная мощность
P2 = P1 – Pст – Pобм – Pмех = UI – Pст – Pобм – Pмех
и кпд
= ((UI – Pст – Pобм – Pмех)/UI) x 100%.
ИЛИ
В машинах постоянного тока различают следующие основные виды потерь мощности:
1. Потери мощности в сопротивлениях цепи якоря: ΔРя = Iя2rя. Как видно, потери мощности ΔРя зависят от нагрузки машины. Поэтому их называют переменными потерями мощности.
2. Потери мощности в стали ΔРc, вызванные главным образом вихревыми токами и перемагничиванием магнитопровода якоря при его вращении. Частично эти потери возникают из-за вихревых токов в поверхностном слое полюсных наконечников, вызванных пульсацией магнитного потока при вращении якоря.
3. Механические потери мощности ΔРмех , причиной которых является трение в подшипниках, щеток о коллектор, вращающихся частей о воздух.
4. Потери мощности в цепи параллельной или независимой обмотки возбуждения: ΔРв = UвIв= Iв2rв.
Потери ΔРс, ΔРмех , ΔРв при изменении нагрузки машин меняются незначительно, вследствие чего их называют постоянными потерями мощности.
КПД машин постоянного тока
η = P2/P1,
где Р2 — полезная мощность машины (у генератора — это электрическая мощность, отдаваемая приемнику, у двигателя — механическая мощность на валу); Р1 — подводимая к машине мощность (у генератора — это механическая мощность, сообщаемая ему первичным двигателем, у двигателя — мощность, потребляемая им от источника постоянного тока; если генератор имеет независимое возбуждение, то P1 включает в себя также мощность, необходимую для питания цепи обмотки возбуждения).
| Рис. 9.36. Зависимость КПД машин постоянного тока от полезной мощности |
Очевидно, мощность Р1 может быть выражена следующим образом: Р1 = Р2+ΣΔP,
где ΔP — сумма перечисленных выше потерь мощности.
С учетом последнею выражения
η = P2/(P2 + ΣΔP).
Когда машина работает вхолостую, полезная мощность Р2 равна нулю и η = 0. Характер изменения КПД при увеличении полезной мощности зависит от значения и характера изменения потерь мощности. Примерный график зависимости η (Р2) приведен на рис. 9.36.
При увеличении полезной мощности КПД сначала возрастает при некотором значении Р2, достигает наибольшего значения, а затем уменьшается. Последнее объясняется значительным увеличением переменных потерь, пропорциональных квадрату тока. Машины рассчитывают обычно таким образом, чтобы наибольшее значение КПД находилось в области, близкой к номинальной мощности Р2ном . Номинальное значение КПД машин мощностью от 1 до 100 кВт лежит примерно в пределах от 0,74 до 0,92 соответственно.
Источник
Дата публикации: 23 января 2013.
Категория: Машины постоянного тока.
Общие положения
Коэффициент полезного действия определяется как отношение полезной, или отдаваемой, мощности P2 к потребляемой мощности P1:
| (1) |
или в процентах
| (2) |
Современные электрические машины имеют высокий коэффициент полезного действия (к. п. д.). Так, у машин постоянного тока мощностью 10 кВт к. п. д. составляет 83 – 87%, мощностью 100 кВт – 88 – 93% и мощностью 1000 кВт – 92 – 96%. Лишь малые машины имеют относительно низкие к. п. д.; например, у двигателя постоянного тока мощностью 10 Вт к. п. д. 30 – 40%.
 |
| Рисунок 1. Зависимость коэффициента полезного действия электрической машины от нагрузки |
Кривая к. п. д. электрической машины η = f(P2) сначала быстро растет с увеличением нагрузки, затем к. п. д. достигает максимального значения (обычно при нагрузке, близкой к номинальной) и при больших нагрузках уменьшается (рисунок 1). Последнее объясняется тем, что отдельные виды потерь (электрические Iа2rа и добавочные) растут быстрее, чем полезная мощность.
Прямой и косвенный методы определения коэффициента полезного действия
Прямой метод определения к. п. д. по экспериментальным значениям P1 и P2 согласно формуле (1) может дать существенную неточность, поскольку, во-первых, P1 и P2 являются близкими по значению и, во-вторых, их экспериментальное определение связано с погрешностями. Наибольшие трудности и погрешности вызывает измерение механической мощности.
Если, например, истинные значения мощности P1 = 1000 кВт и P2 = 950 кВт могут быть определены с точностью 2%, то вместо истинного значения к. п. д.
η = 950/1000 = 0,95
можно получить
или
Поэтому ГОСТ 25941-83, “Машины электрические вращающиеся. Методы определения потерь и коэффициента полезного действия”, предписывает для машин с η% ≥ 85% косвенный метод определения к. п. д., при котором по экспериментальным данным определяется сумма потерь pΣ.
Подставив в формулу (1) P2 = P1 – pΣ, получим
| (3) |
Применив здесь подстановку P1 = P2 + pΣ, получим другой вид формулы:
| (4) |
Так как более удобно и точно можно измерять электрические мощности (для двигателей P1 и для генераторов P2), то для двигателей более подходящей является формула (3) и для генераторов формула (4). Методы экспериментального определения отдельных потерь и суммы потерь pΣ описываются в стандартах на электрические машины и в руководствах по испытанию и исследованию электрических машин. Если даже pΣ определяется со значительно меньшей точностью, чем P1 или P2, при использовании вместо выражения (1) формул (3) и (4) получаются все же значительно более точные результаты.
Условия максимума коэффициента полезного действия
Различные виды потерь различным образом зависят от нагрузки. Обычно можно считать, что одни виды потерь остаются постоянными при изменении нагрузки, а другие являются переменными. Например, если генератор постоянного тока работает с постоянной скоростью вращения и постоянным потоком возбуждения, то механические и магнитные потери являются также постоянными. Наоборот, электрические потери в обмотках якоря, добавочных полюсов и компенсационной изменяются пропорционально Iа², а в щеточных контактах – пропорционально Iа. Напряжение генератора при этом также приблизительно постоянно, и поэтому с определенной степенью точности P2 ∼ Iа.
Таким образом, в общем, несколько идеализированном случае можно положить, что
или
где коэффициент нагрузки
Kнг = I / Iн = P2 / P2н | (6) |
Определяет относительную величину нагрузки машины.
Суммарные потери также можно выразить через kнг:
pΣ = p0 + kнг × p1 + kнг² × p2, | (7) |
где p0 – постоянные потери, не зависящие от нагрузки; p1 – значение потерь, зависящих от первой степени kнг при номинальной нагрузке; p2 – значение потерь, зависящих от квадрата kнг, при номинальной нагрузке.
Подставим P2 из (5) и pΣ из (7) в формулу к. п. д.
Тогда
| (8) |
Установим, при каком значении kнг к. п. д. достигает максимального значения, для чего определим производную dη/dkнг по формуле (8) и приравняем ее к нулю:
Это уравнение удовлетворяется, когда его знаменатель равен бесконечности, т. е. при kнг = ∞. Этот случай не представляет интереса. Поэтому необходимо положить равным нулю числитель. При этом получим
Таким образом, к. п. д. будет максимальным при такой нагрузке, при которой переменные потери kнг² × p2, зависящие от квадрата нагрузки, становятся равными постоянным потерям p0.
Значение коэффициента нагрузки при максимуме к. п. д., согласно формуле (9),
| (10) |
Если машина проектируется для заданного значения ηмакс, то, поскольку потери kнг × p1 обычно относительно малы, можно считать, что
p0 + p2 ≈ pΣ = const.
Изменяя при этом соотношение потерь p0 и p2, можно достичь максимального значения к. п. д. при различных нагрузках. Если машина работает большей частью при нагрузках, близких к номинальной, то выгодно, чтобы значение kнг [смотрите формулу (10)] было близко к единице. Если машина работает в основном при малых нагрузках, то выгодно, чтобы значение kнг [смотрите формулу (10)] было соответственно меньше.
Источник: Вольдек А. И., “Электрические машины. Учебник для технических учебных заведений” – 3-е издание, переработанное – Ленинград: Энергия, 1978 – 832с.
Источник
Преобразование
электрической энергии в механическую
с помощью двигателей и механической в
электрическую с помощью генераторов
сопровождается потерями энергии, чему
соответствуют определенные потери
мощности. От значений потерь мощности
зависит важнейший энергетический
показатель машин постоянного тока —
их КПД. Потери мощности в машинах приводят
к их нагреванию.
В машинах постоянного
тока различают следующие основные виды
потерь мощности:
Потери
мощности в сопротивлениях цепи якоря:
ΔРя = Iя2rя.
Как видно, потери мощности ΔРя зависят
от нагрузки машины. Поэтому их называют
переменными потерями мощности.Потери
мощности в стали ΔРc,
вызванные главным образом вихревыми
токами и перемагничиванием магнитопровода
якоря при его вращении. Частично эти
потери возникают из-за вихревых токов
в поверхностном слое полюсных
наконечников, вызванных пульсацией
магнитного потока при вращении якоря.Механические
потери мощности ΔРмех ,
причиной которых является трение в
подшипниках, щеток о коллектор,
вращающихся частей о воздух.Потери
мощности в цепи параллельной или
независимой обмотки возбуждения:
ΔРв = UвIв =
Iв2rв.
Потери
ΔРс,
ΔРмех ,
ΔРв при
изменении нагрузки машин меняются
незначительно, вследствие чего их
называют постоянными потерями мощности.
КПД машин постоянного
тока
η
= P2/P1,
где Р2 —
полезная мощность машины (у генератора
— это электрическая мощность, отдаваемая
приемнику, у двигателя — механическая
мощность на валу); Р1 —
подводимая к машине мощность (у генератора
— это механическая мощность, сообщаемая
ему первичным двигателем, у двигателя
— мощность, потребляемая им от источника
постоянного тока; если генератор имеет
независимое возбуждение, то P1 включает
в себя также мощность, необходимую для
питания цепи обмотки возбуждения).
Рис. 9.36. Зависимость
КПД машин постоянного тока от полезной
мощности
Очевидно,
мощность Р1 может
быть выражена следующим образом:Р1 = Р2 + ΣΔP,
где
ΔP —
сумма перечисленных выше
потерь мощности.
С учетом последнею
выражения
η
= P2/(P2 +
ΣΔP).
Когда
машина работает вхолостую, полезная
мощность Р2 равна
нулю и η = 0. Характер изменения КПД при
увеличении полезной мощности зависит
от значения и характера изменения потерь
мощности. Примерный график зависимости
η (Р2)
приведен на рис. 9.36.
При
увеличении полезной мощности КПД сначала
возрастает при некотором значении Р2,
достигает наибольшего значения, а затем
уменьшается. Последнее объясняется
значительным увеличением переменных
потерь, пропорциональных квадрату тока.
Машины рассчитывают обычно таким
образом, чтобы наибольшее значение КПД
находилось в области, близкой к номинальной
мощности Р2ном .
Номинальное значение КПД машин мощностью
от 1 до 100 кВт лежит примерно в пределах
от 0,74 до 0,92 соответственно.
Асинхронные машины устройство асинхронного двигателя трехфазного тока
Асинхронный
двигатель трехфазного тока представляет
собой электрическую машину, служащую
для преобразования электрической
энергии трехфазного тока в механическую.
Благодаря простоте устройства, высокой
надежности в эксплуатации и меньшей
стоимости по сравнению с другими
двигателями асинхронные двигатели
трехфазного тока нашли широкое применение
в промышленности и сельском хозяйстве.
С их помощью приводятся в движение
металлорежущие и деревообрабатывающие
станки, подъемные краны, лебедки, лифты,
эскалаторы, насосы, вентиляторы и другие
механизмы.
На
рис. 10.1 изображен продольный (а)
и поперечный (б)
разрезы асинхронного двигателя
трехфазного тока, а также части сердечников
ротора и статора с пазами и обмотками
(в).
Двигатель
имеет две основные части: неподвижную
— статор и вращающуюся — ротор. Статор
состоит из корпуса 1, представляющего
собой основание всего двигателя. Он
должен обладать достаточной механической
прочностью и выполняется из стали,
чугуна или алюминия. С помощью
лап 8 двигатель
крепится к фундаменту или непосредственно
к станине производственного механизма.
Существуют и другие способы крепления
двигателя к производственному механизму.
В
корпус 1 вмонтирован
сердечник 2 статора,
представляющий собой полый цилиндр, на
внутренней поверхности которого имеются
пазы 3 с
обмоткой статора 4. Часть
обмотки 4′,находящаяся
вне пазов 3, называется
лобовой; она отогнута к торцам сердечника
статора. Так как в сердечнике статора
действует переменный магнитный поток
и на статор действует момент, развиваемый
двигателем, сердечник должен изготовляться
из ферромагнитного материала достаточной
механической прочности. Для уменьшения
потерь от вихревых токов сердечник
статора собирают из отдельных листов
(толщиной 0,35 — 0,5 мм) электротехнической
стали и каждый лист изолируют лаком или
другим изоляционным материалом.

Рис
10.1 Продольный (а)
и поперечный (б)
разрезы асинхронного двигателя, части
сердечников ротора и статора с пазами
и обмоткой (в)
Обмотка статора
выполняется в основном из изолированного
медного провода круглого или прямоугольного
сечения, реже — из алюминиевого провода.
В качестве изоляции проводов друг от
друга используют бумагу, хлопчатобумажную
ткань, пропитанные различными лаками,
слюду, стекловолокно и различные эмали.
Для изоляции проводов обмотки от
сердечника статора служат электроизоляционный
картон, слюда, асбест, стекловолокно.
В
последнее время для изоляции обмоток
асинхронных двигателей низкого напряжения
применяют лавсан с электроизоляционным
картоном, для двигателей высокого
напряжения — пленки на слюдяной основе.
На рис. 10.2 изображены разрезы пазов с
обмоткой статоров асинхронных двигателей
низкого (а)
и высокого (б)
напряжения.
Обозначения
на рис. 10.2, а:
1 —
провод с эмалевой изоляцией марки
ПЭТВ-1; 2,
3 — пазовая
и межсекционная изоляции из
пленкоэлектрокартона на лавсане толщиной
0,27 мм. Обозначения на рис. 10.2, б:1 —
провод медный; 2 —
витковая изоляция из поликарбонатовой
пленки; 3,
4— пазовая
и межсекционная изоляции из слюдяной
ленты на термореактивном лаке; 5 —
клин из дерева твердых пород.
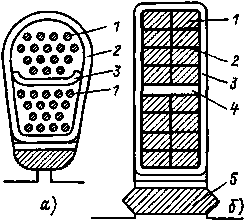
Рис.
10.2. Разрез паза с обмоткой статора
асинхронного двигателя при номинальном
напряжении до 500 В (а)
и 6000 В (б)
Обмотка
статора состоит из трех отдельных
частей, называемых фазами. Фазы могут
быть соединены между собой звездой или
треугольником. Начала обмоток будем
обозначать на схемах буквами А,
В, С,концы
— X,
Y, Z. Обмотки
двигателей малой и средней мощности
изготовляют на напряжения 380/220 и 220/127
В. Напряжение, указанное в числителе,
соответствует соединению обмоток
звездой, в знаменателе — треугольником.
Таким образом, один и тот же двигатель
при соответствующей схеме соединения
его обмоток может быть включен в сеть
на любое указанное в паспорте напряжение.
Существуют двигатели на 500, 660 и 1140 В.
Двигатели
высокого напряжения изготовляют на
напряжения 3000 и 6000 В.
На корпусе
двигателя имеется доска с зажимами, с
помощью которых обмотка присоединяется
к трехфазной сети. К каждому зажиму
подключен соответствующий вывод обмотки.
Для зажимов приняты следующие обозначения:
зажимы, к которым подключены начала
обмоток, обозначают буквами С1,
С2 и С3, концы
обмоток — соответственно С4,
С5 и С6.
Сердечник 5 ротора
(см. рис. 10.1) представляет собой цилиндр,
собранный, так же как и сердечник статора,
из отдельных листов электротехнической
стали, в котором имеются пазы 6 с
обмоткой 7 ротора.
| Рис. |

|
Рис. |
Обмотки
ротора бывают двух видов — короткозамкнутые
и фазные. Соответственно этому различают
асинхронные двигатели с короткозамкнутым
и фазным ротором (с контактными кольцами).
На рис. 10.3, а изображен
короткозамкнутый ротор, на рис. 10.3, б —
короткозамкнутая обмотка. Короткозамкнутая
обмотка состоит из стержней 1, расположенных
в пазах, и замыкающих колец 2. Стержни
присоединены к замыкающим кольцам, в
результате чего обмотка оказывается
короткозамкнутой. Стержни и замыкающие
кольца в одних двигателях изготовляют
из меди, в других — из алюминия, в третьих
— из бронзы и т. д. Алюминиевую обмотку
получают путем заливки в пазы жидкого
алюминия. По внешнему виду (рис. 10.3, б)
короткозамкнутая обмотка напоминает
беличье колесо, поэтому ее иногда
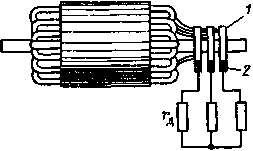
называют «беличьей клеткой». На рис.
10.4 изображен фазный ротор (с контактными
кольцами).
Фазную обмотку ротора
выполняют так же, как и обмотку статора.
Она всегда соединяется звездой. Начала
фаз обмотки присоединяют к контактным
кольцам 1 (рис.
10.4), которые изготовляют из стали или
латуни и располагают на валу двигателя.
Кольца изолированы друг от друга, а
также от вала двигателя. К кольцам
прижимаются пружинами металлографитные
щетки2, расположенные
в неподвижных щеткодержателях. С помощью
контактных колец и щеток в цепь ротора
включается дополнительный резистор rд ,
который является или пусковым (для
увеличения пускового момента и
одновременного уменьшения пускового
тока) или регулировочным (для изменения
частоты вращения ротора двигателя).
Вал
ротора 9 (см.
рис. 10.1) изготовлен из стали и вращается
в шариковых или роликовых
подшипниках 10. Подшипники
укреплены в подшипниковых щитах 11, которые
изготовлены из чугуна или
стали и прикрепляются к
корпусу болтами.
| Рис. |
Соединение
отдельных проводников одной фазы обмотки
между собой и взаимное расположение
обмоток всех трех фаз статора можно
проследить с помощью развернутой схемы
обмотки статора двухполюсного асинхронного
двигателя, изображенной на рис.
10.5, а.Обозначения
на рисунке: πD —
длина внутренней окружности сердечника
статора; l —
длина сердечника статора, цифры от 1 до
24 — пазы.
Фаза А
— X начинается
с проводника, лежащего в пазу 1.
Первый проводник с помощью лобовой
части обмотки Л1 соединен
с проводником, лежащим в пазу 13, последний
в свою очередь с помощью лобовой части
обмотки Л2 соединен
с проводником, лежащим в пазу 2, и
т. д. Конец обмотки соединен с проводником,
лежащим в пазу 16. Таким
образом, фаза А
— Xзанимает
восемь пазов. Аналогичным образом
соединяются проводники фаз В
— Y и С
— Z.
Из рисунка видно, что начала и концы
одной фазы двухполюсного двигателя
сдвинуты в пространстве относительно
другой на восемь пазов, что составляет
1/3 окружности, т. е. 120°.
Часть
обмотки, выделенная на рис. 10.5, а жирной
линией, называется секцией. Обычно
секция состоит не из одного витка, как
на рис, 10.5, а, а
из нескольких витков (рис. 10.5, б).
Такие секции изготовляют на шаблонах,
потом их изолируют и придают им нужную
форму. Секции укладывают в пазы и
закрепляют с помощью деревянных клиньев.
После того как все секции уложены, их
соединяют в соответствии с развернутой
схемой обмотки статора двигателя. Наряду
с однослойными обмотками (см. рис.
10.5, а),
когда в пазу расположена одна сторона
одной секции, применяют двухслойные
обмотки, в каждом пазу которой расположены
две стороны двух секций.
Тепловая
энергия, возникающая в двигателе в
результате потерь электрической энергии
в его обмотках и магнитопроводе, нагревает
двигатель. Для увеличения теплоотдачи
ротор снабжен крыльчаткой 12 (см.
рис. 10.1), прикрепленной к замыкающим
кольцам короткозамкнутой обмотки.
Крыльчатка обеспечивает интенсивное
движение воздуха внутри и снаружи
двигателя. На рис. 10.1 стрелками указано
направление движения воздуха через
двигатель.
Соседние файлы в папке Архив ZIP – WinRAR
- #
- #
- #
- #
Источник