
Коэффициент полезного действия трехфазного асинхронного двигателя

  ýëåêòðè÷åñêîì äâèãàòåëå ïðè ïðåîáðàçîâàíèè îäíîãî âèäà ýíåðãèè â äðóãîé ÷àñòü ýíåðãèè òåðÿåòñÿ â âèäå òåïëîòû, ðàññåèâàåìîé â ðàçëè÷íûõ ÷àñòÿõ äâèãàòåëÿ.  ýëåêòðè÷åñêèõ äâèãàòåëÿõ èìåþòñÿ ïîòåðè ýíåðãèè òðåõ âèäîâ: ïîòåðè â îáìîòêàõ, ïîòåðè â ñòàëè è ìåõàíè÷åñêèå ïîòåðè. Êðîìå òîãî, èìåþòñÿ íåçíà÷èòåëüíûå äîáàâî÷íûå ïîòåðè.
 ýëåêòðè÷åñêîì äâèãàòåëå ïðè ïðåîáðàçîâàíèè îäíîãî âèäà ýíåðãèè â äðóãîé ÷àñòü ýíåðãèè òåðÿåòñÿ â âèäå òåïëîòû, ðàññåèâàåìîé â ðàçëè÷íûõ ÷àñòÿõ äâèãàòåëÿ.  ýëåêòðè÷åñêèõ äâèãàòåëÿõ èìåþòñÿ ïîòåðè ýíåðãèè òðåõ âèäîâ: ïîòåðè â îáìîòêàõ, ïîòåðè â ñòàëè è ìåõàíè÷åñêèå ïîòåðè. Êðîìå òîãî, èìåþòñÿ íåçíà÷èòåëüíûå äîáàâî÷íûå ïîòåðè.
Ïîòåðè ýíåðãèè â àñèíõðîííîì äâèãàòåëå ðàññìîòðèì ïðè ïîìîùè åãî ýíåðãåòè÷åñêîé äèàãðàììû (ðèñ. 1). Íà äèàãðàììå Ð1 – ìîùíîñòü, ïîäâîäèìàÿ ê ñòàòîðó äâèãàòåëÿ èç ñåòè. Îñíîâíàÿ ÷àñòü Ðýì ýòîé ìîùíîñòè, çà âû÷åòîì ïîòåðü â ñòàòîðå, ïåðåäàåòñÿ ýëåêòðîìàãíèòíûì ïóòåì íà ðîòîð ÷åðåç çàçîð. Ðýì íàçûâàåòñÿ ýëåêòðîìàãíèòíîé ìîùíîñòüþ.
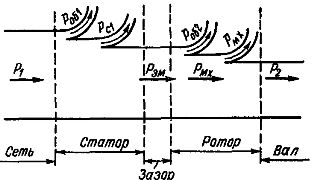
Ðèñ. 1. Ýíåðãåòè÷åñêàÿ äèàãðàììà äâèãàòåëÿ
Ïîòåðè ìîùíîñòè â ñòàòîðå ñêëàäûâàþòñÿ èç ïîòåðü ìîùíîñòè â åãî îáìîòêå Pîá1 = m1 õ r1 õ I12 è ïîòåðü â ñòàëè Pñ1. Ìîùíîñòü Pñ1 ÿâëÿåòñÿ ïîòåðÿìè íà âèõðåâûå òîêè è íà ïåðåìàãíè÷èâàíèå ñåðäå÷íèêà ñòàòîðà.
Ïîòåðè â ñòàëè èìåþòñÿ è â ñåðäå÷íèêå ðîòîðà àñèíõðîííîãî äâèãàòåëÿ, íî îíè íåâåëèêè è ìîãóò íå ïðèíèìàòüñÿ âî âíèìàíèå. Ýòî îáúÿñíÿåòñÿ òåì, ÷òî ñêîðîñòü âðàùåíèÿ ìàãíèòíîãî ïîòîêà îòíîñèòåëüíî ñòàòîðà n0 âî ìíîãî ðàç áîëüøå ñêîðîñòè âðàùåíèÿ ìàãíèòíîãî ïîòîêà îòíîñèòåëüíî ðîòîðà n0 – n, åñëè ñêîðîñòü âðàùåíèÿ ðîòîðà àñèíõðîííîãî äâèãàòåëÿ n ñîîòâåòñòâóåò óñòîé÷èâîé ÷àñòè åñòåñòâåííîé ìåõàíè÷åñêîé õàðàêòåðèñòèêè.
Ìåõàíè÷åñêàÿ ìîùíîñòü àñèíõðîííîãî äâèãàòåëÿ Ðìõ, ðàçâèâàåìàÿ íà âàëó ðîòîðà, ìåíüøå ýëåêòðîìàãíèòíîé ìîùíîñòè Ðýì íà çíà÷åíèå ìîùíîñòè Pîá2 ïîòåðü â îáìîòêå ðîòîðà:
Ðìõ = Ðýì – Pîá2
Ìîùíîñòü íà âàëó äâèãàòåëÿ:
Ð2 = Ðìõ – pìõ,
ãäå pìõ – ìîùíîñòü ìåõàíè÷åñêèõ ïîòåðü, ðàâíàÿ ñóììå ïîòåðü íà òðåíèå â ïîäøèïíèêàõ, íà òðåíèå âðàùàþùèõñÿ ÷àñòåé î âîçäóõ (âåíòèëÿöèîííûå ïîòåðè) è íà òðåíèå ùåòîê î êîëüöà (äëÿ äâèãàòåëåé ñ ôàçíûì ðîòîðîì).
Ýëåêòðîìàãíèòíàÿ è ìåõàíè÷åñêàÿ ìîùíîñòè ðàâíû:
Ðýì = ω0M, Ðìõ = ωM,
ãäå ω0 è ω – ñèíõðîííàÿ ñêîðîñòü è ñêîðîñòü âðàùåíèÿ ðîòîðà äâèãàòåëÿ; Ì – ìîìåíò, ðàçâèâàåìûé äâèãàòåëåì, ò. å. ìîìåíò, ñ êîòîðûì âðàùàþùååñÿ ìàãíèòíîå ïîëå äåéñòâóåò íà ðîòîð.
Èç ýòèõ âûðàæåíèé ñëåäóåò, ÷òî ìîùíîñòü ïîòåðü â îáìîòêå ðîòîðà:

èëè Pîá2 = s õ Pýì
 ñëó÷àÿõ, êîãäà èçâåñòíî àêòèâíîå ñîïðîòèâëåíèå ã2 ôàçû îáìîòêè ðîòîðà, ïîòåðè â ýòîé îáìîòêå ìîãóò áûòü íàéäåíû òàêæå èç âûðàæåíèÿ Pîá2 = m2õ r2õ I22.
 àñèíõðîííûõ ýëåêòðîäâèãàòåëÿõ èìåþòñÿ òàêæå äîáàâî÷íûå ïîòåðè, îáóñëîâëåííûå çóá÷àòîñòüþ ðîòîðà è ñòàòîðà, âèõðåâûìè òîêàìè â ðàçëè÷íûõ êîíñòðóêòèâíûõ óçëàõ äâèãàòåëÿ è äðóãèìè ïðè÷èíàìè. Ïðè ïîëíîé íàãðóçêå äâèãàòåëÿ ïîòåðè Pä ïðèíèìàþòñÿ ðàâíûìè 0,5% åãî íîìèíàëüíîé ìîùíîñòè.
Êîýôôèöèåíò ïîëåçíîãî äåéñòâèÿ (ÊÏÄ) àñèíõðîííîãî äâèãàòåëÿ:
η = P2 / P1 = (P1 – (Pîá – Pñ – Pìõ – Pä)) / P1,
ãäå Ðîá =Pîá1 + Ðîá2 – ñóììàðíàÿ ìîùíîñòü ïîòåðü â îáìîòêàõ ñòàòîðà è ðîòîðà àñèíõðîííîãî äâèãàòåëÿ.
Ïîñêîëüêó îáùèå ïîòåðè çàâèñÿò îò íàãðóçêè, òî è ÊÏÄ àñèíõðîííîãî äâèãàòåëÿ ÿâëÿåòñÿ ôóíêöèåé íàãðóçêè.
Íà ðèñ. 2, à äàíà êðèâàÿ η = f(Ð/Ðíîì), ãäå Ð/Ðíîì – îòíîñèòåëüíàÿ ìîùíîñòü.
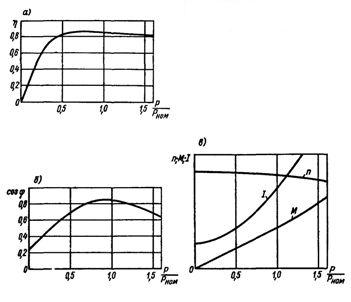
Ðèñ. 2. Ðàáî÷èå õàðàêòåðèñòèêè àñèíõðîííîãî äâèãàòåëÿ
Àñèíõðîííûé ýëåêòðîäâèãàòåëü êîíñòðóèðóåòñÿ òàê, ÷òîáû ìàêñèìóì åå êîýôôèöèåíòà ïîëåçíîãî äåéñòâèÿ ηmax èìåë ìåñòî ïðè íàãðóçêå, íåñêîëüêî ìåíüøåé íîìèíàëüíîé. ÊÏÄ äâèãàòåëÿ äîñòàòî÷íî âûñîê è â øèðîêîì äèàïàçîíå íàãðóçîê (ðèñ. 2, à). Äëÿ áîëüøèíñòâà ñîâðåìåííûõ àñèíõðîííûõ äâèãàòåëåé ÊÏÄ èìååò çíà÷åíèå 80 – 90%, à äëÿ ìîùíûõ äâèãàòåëåé 90-96%.
Источник
Преобразование электрической энергии в механическую в асинхронном двигателе, как и в других электрических машинах, связано с потерями энергии, поэтому полезная мощность на выходе двигателя Р2 всегда меньше мощности на входе (потребляемой мощности) Р1 на величину потерь Р :
Р2 = Р1 – Р (13.1)
Потери Р преобразуются в теплоту, что в конечном итоге ведет к нагреву машины. Потери в электрических машинах разделяются на основные и добавочные. Основные потери включают в себя магнитные, электрические и механические.
Магнитные потери Рм в асинхронном двигателе вызваны потерями на гистерезис и потерями на вихревые токи, происходящими в сердечнике при его перемагничивании. Величина магнитных потерь пропорциональна частоте перемагничивания Рм = f β,
где β = 1,3 ÷ 1,5. Частота перемагничивания сердечника статора равна частоте тока в сети (f = f1), а частота перемагничивания сердечника ротора f = f2 =f1s.При частоте тока в сети f 1 = 50 Гц при номинальном скольжении sном = 1 ÷ 8 % частота перемагничивания ротора f = f2 = 2 ÷ 4 Гц, поэтому магнитные потери в сердечнике ротора настолько малы, что их в практических расчетах не учитывают.
Электрические потери в асинхронном двигателе вызваны нагревом обмоток статора и ротора проходящими по ним токами. Величина этих потерь пропорциональна квадрату тока в обмотке (Вт):
электрические потери в обмотке статора
Рэ1 = m1 I21 r1; (13.2)
электрические потери в обмотке ротора
Рэ2 = m2 I22 r2 = m1 I′ 21 r′ 1 (13.3)
Здесь r1 и r2 — активные сопротивления обмоток фаз статора и ротора пересчитанные на рабочую температуру Θраб (см. § 8.4):
r1 = r1.20 [1 + α (Θраб – 20)]; r2 = r2.20 [1 + α (Θра6 – 20)], (13.4)
где r1.20 и r2.20 — активные сопротивления обмоток при температуре Θ1 = 20 °С; α — температурный коэффициент, для меди и алюминия α = 0,004.
Электрические потери в роторе прямо пропорциональны скольжению:
Рэ2 = s Рэм (13.5)
где Рэм — электромагнитная мощность асинхронного двигателя, Вт:
Рэм = Р1 = (Рм + Рэ1) (13-6)
Из (13.5) следует, что работа асинхронного двигателя экономичнее при малых скольжениях, так как с ростом скольжения растут электрические потери в роторе.
В асинхронных двигателях с фазным ротором помимо перечисленных электрических потерь имеют место еще и электрическиe потери в щеточном контакте Рэ.щ = 3 I2 ΔUщ /2, где Uщ =2,2 В – переходное падение напряжения на пару щеток.
Механические потери Рмех — это потери на трение в подшипниках и на вентиляцию. Величина этих потерь пропорциональна квадрату частоты вращения ротора (Рмех = n22). В асинхронных двигателях с фазным ротором механические потери происходят еще и за счет трения между щетками и контактными кольцами ротора.
Добавочные потери включают в себя все виды трудноучитываемых потерь, вызванных действием высших гармоник МДС, пульсацией магнитной индукции в зубцах и другими причинами. В соответствии с ГОСТом добавочные потери асинхронных двигателей принимают равными 0,5% от подводимой к двигателю мощности Р1:
Рдо6 = 0,005 Р1. (13.7)
При расчете добавочных потерь для неноминального режима следует пользоваться выражением
Р′доб = Рдоб β2 (13-8)
где β = I1/ I1ном —коэффициент нагрузки.
Сумма всех потерь асинхронного двигателя (Вт)
P = Рэм + Рэ1 + Рэ2 + Рмех + Рдоб. (13.9)
На рис. 13.1 представлена энергетическая диаграмма асинхронного двигателя, из которой видно, что часть подводимой к двигателю мощности Р1 = m1 U1 I1 cos φ1 затрачивается в статоре на магнитные Ры и электрические Рэ1 потери. Оставшаяся после этого электромагнитная мощность Рэм [см. (13.6)] передается на ротор, где частично расходуется на электрические потери Рэ2 и преобразуется в полную механическую мощность Р′2. Часть мощности идет на покрытие механических Рмех и добавочных потерь Рдоб, а оставшаяся часть этой мощности Р2 составляет полезную мощность двигателя.
У асинхронного двигателя КПД
η = Р2/ Р1 =1 – P. (13.10)
Электрические потери в обмотках РЭ1 и РЭ2 являются переменными потерями, так как их величина зависит от нагрузки двигателя, т. е. от значений токов в обмотках статора и ротора [см. (13.2) и (13.3)]. Переменными являются также и добавочные потери (13.8). Что же касается магнитных Рм и механических Рмех, то они практически не зависят от нагрузки (исключение составляют двигатели, у которых с изменением нагрузки в широком диапазоне меняется частота вращения).
Коэффициент полезного действия асинхронного двигателя с изменениями нагрузки также меняет свою величину: в режиме холостого хода КПД равен нулю, а затем с ростом нагрузки он увеличивается, достигая максимума при нагрузке (0,7 ÷ 0,8)Рном. При дальнейшем увеличении нагрузки КПД незначительно снижается, а при перегрузке (P2 > Рном) он резко убывает, что объясняется интенсивным ростом переменных потерь (Рэ1 + Рэ2 + Рдоб), величина которых пропорциональна квадрату тока статора, и уменьшением коэффициента мощности. График зависимости КПД от нагрузки η = f (β) для асинхронных двигателей имеет вид, аналогичный представленному на рис. 1.41 (см. рис. 13.7).
КПД трехфазных асинхронных двигателей общего назначения при номинальной нагрузке составляет: для двигателей мощностью от 1 до 10 кВт ηном = 75 ÷ 88%, для двигателей мощностью более 10 кВт ηном =90 ÷ 94%.
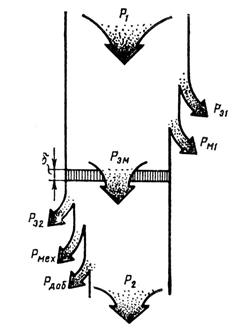
Рис. 13.1. Энергетическая диаграмма асинхронного двигателя
Пример 13.1.Трехфазный асинхронный двигатель работает от сети напряжением 660 В при соединении обмоток статора звездой. При номинальной нагрузке он потребляет из сети мощность Р1 = 16,7 кВт при коэффициенте мощности cos φ1 = 0,87. Частота ηвращения nном = 1470 об/мин. Требуется определилить КПД двигателя η hоm, если магнитные потери Рм = 265 Вт, а механические потери Рмех = 123 Вт. Активное сопротивление фазы обмотки статора r1.20 = 0,8 Ом, и класс нагревостойкости изоляции двигателя F (рабочая температура Θра6 =115 °С).
Решение. Ток в фазе обмотки статора
I1ном =  =
=  =16,8 А
=16,8 А
где U1 = 660/  = 380 В.
= 380 В.
Сопротивление фазы обмотки статора, пересчитанное на рабочую температуру
Θраб = 115 ˚С, по (13.4)
r1 = r1.20 [1 + α (Θраб – 20)] = 0,8[1 + 0,004(115 – 20)] = 1,1 Ом.
Электрические потери в обмотке статора по (13.2)
Рэ1 = m1 I21ном r1 = 3 • 16,82 • 1,1 = 93 1 Вт.
Электромагнитная мощность двигателя по (13.6)
РЭМ = Р1 – (Рм + Рэ1) = 16,7 • 103 – (265 + 931) = 15504 Вт.
Номинальное скольжение sном = (n1 – nном)/ n1 = (1500 – 1470)/1500 = 0,020 . Электрические потери в обмотке ротора по (13.5)
Рэ2 =sном Рэм = 0,020 • 15504 = 310 Вт.
Добавочные потери по (13.7)
Рдо6 = 0,005 Р1 =0,005 • 16,7 • 103 =83 Вт.
Суммарные потери по (13.9)
Р = Рм + Рэ1 + Рэ2 + Рмех + Рмех = 265 + 931 + 310 + 123 + 83 = 1712 Вт.
КПД двигателя в номинальном режиме по (13.10)
ηном = 1 – Р/ Р1 = 1 – 1712/ (16,7 • 103) = 0,898 , или 89,8%.
Коэффициент полезного действия является одним из основных параметров асинхронного двигателя, определяющим его энергетические свойства — экономичность в процессе эксплуатации. Кроме того, КПД двигателя, а точнее величина потерь в нем, регламентирует температуру нагрева его основных частей и в первую очередь его обмотки статора. По этой причине двигатели с низким КПД (при одинаковых условиях охлаждения) работают при более высокой температуре нагрева обмотки статора, что ведет к снижению их надежности и долговечности (см. § 8.4).
Источник
Каждая система или устройство обладает определенным коэффициентом полезного действия (КПД). Данный показатель характеризует эффективность их работы по отдаче или преобразованию какого-либо вида энергии. По своему значению КПД является безмерной величиной, представляемой в виде числового значения в пределах от 0 до 1, или в процентном отношении. Эта характеристика в полной мере касается и всех типов электрических двигателей.
Характеристики КПД в электродвигателях
Электрические двигатели относятся к категории устройств, выполняющих преобразование электрической энергии в механическую. Коэффициент полезного действия для данных устройств определяет их эффективность в деле выполнения основной функции.
Как найти кпд двигателя? Формула КПД электродвигателя выглядит так: ƞ = Р2/Р1. В этой формуле Р1 является подведенной электрической мощностью, а Р2 – полезной механической мощностью, вырабатываемой двигателем. Значение электрической мощности (Р) определяется формулой Р = UI, а механической – Р = А/t, как отношение работы к единице времени.
Коэффициент полезного действия обязательно учитывается при выборе электродвигателя. Большое значение имеют потери КПД, связанные с реактивными токами, снижением мощности, нагревом двигателя и другими негативными факторами.
Превращение электрической энергии в механическую сопровождается постепенной потерей мощности. Потеря КПД чаще всего связана с выделением тепла, когда происходит нагрев электродвигателя в процессе работы. Причины потерь могут быть магнитными, электрическими и механическими, возникающими под действием силы трения. Поэтому в качестве примера лучше всего подходит ситуация, когда электрической энергии было потреблено на 1000 рублей, а полезной работы произведено всего лишь на 700-800 рублей. Таким образом, коэффициент полезного действия в данном случае составит 70-80%, а вся разница превращается в тепловую энергию, которая и нагревает двигатель.
Для охлаждения электродвигателей используются вентиляторы, прогоняющие воздух через специальные зазоры. В соответствии с установленными нормами, двигатели А-класса могут нагреваться до 85-90С, В-класса – до 110С. Если температура двигателя превышает установленные нормы, это свидетельствует о возможном скором межвитковом замыкании статора.
В зависимости от нагрузки КПД электродвигателя может изменять свое значение:
- Для холостого хода – 0;
- При 25% нагрузке – 0,83;
- При 50% нагрузке – 0,87;
- При 75% нагрузке – 0,88;
- При полной 100% нагрузке КПД составляет 0,87.
Одной из причин снижения КПД электродвигателя может стать асимметрия токов, когда на каждой из трех фаз появляется разное напряжение. Например, если в 1-й фазе имеется 410 В, во 2-й – 402 В, в 3-й – 288 В, то среднее значение напряжения составит (410+402+388)/3 = 400 В. Асимметрия напряжения будет иметь значение: 410 – 388 = 22 вольта. Таким образом, потери КПД по этой причине составят 22/400 х 100 = 5%.
Падение КПД и общие потери в электродвигателе
Существует множество негативных факторов, под влиянием которых складывается количество общих потерь в электрических двигателях. Существуют специальные методики, позволяющие заранее их определить. Например, можно определить наличие зазора, через который мощность частично подается из сети к статору, и далее – на ротор.
Потери мощности, возникающие в самом стартере, состоят из нескольких слагаемых. В первую очередь, это потери, связанные с вихревыми токами и частичным перемагничиванием сердечника статора. Стальные элементы оказывают незначительное влияние и практически не принимаются в расчет. Это связано со скоростью вращения статора, которая значительно превышает скорость магнитного потока. В этом случае ротор должен вращаться в строгом соответствии с заявленными техническими характеристиками.
Значение механической мощности вала ротора ниже, чем электромагнитная мощность. Разница составляет количество потерь, возникающих в обмотке. К механическим потерям относятся трения в подшипниках и щетках, а также действие воздушной преграды на вращающиеся части.
Для асинхронных электродвигателей характерно наличие дополнительных потерь из-за наличия зубцов в статоре и роторе. Кроме того, в отдельных узлах двигателя возможно появление вихревых потоков. Все эти факторы в совокупности снижают КПД примерно на 0,5% от номинальной мощности агрегата.
При расчете возможных потерь используется и формула КПД двигателя, позволяющая вычислить уменьшение этого параметра. Прежде всего учитываются суммарные потери мощности, которые напрямую связаны с нагрузкой двигателя. С возрастанием нагрузки, пропорционально увеличиваются потери и снижается коэффициент полезного действия.
В конструкциях асинхронных электродвигателей учитываются все возможные потери при наличии максимальных нагрузок. Поэтому диапазон КПД этих устройств достаточно широкий и составляет от 80 до 90%. В двигателях повышенной мощности этот показатель может доходить до 90-96%.
Источник
Электрическими двигателями переменного или постоянного тока комплектуются приводы станков, насосов и вентиляторов, а также других механизмов, используемых на предприятиях тяжелой и легкой промышленности. Рентабельность производства напрямую зависит от себестоимости продукции, на которую в большой степени влияет эффективность эксплуатации оборудования, поэтому КПД и мощность электродвигателя являются основными параметрами, на основании которых выполняется подбор привода.
Определение КПД электродвигателя
Принцип работы любой электрической машины основан на преобразовании энергии тока, протекающего по обмоткам статора и создающего магнитное поле, во вращение ротора. Коэффициент полезного действия (КПД) электродвигателя определяется соотношением вырабатываемой им механической мощности на валу (p2) к полной мощности, потребляемой из сети (p1) и выражается в процентах:
η=p2/p1*100%
 Исходя из формулы, следует, что чем ближе этот параметр к единице, тем выше будет эффективность использования оборудования.
Исходя из формулы, следует, что чем ближе этот параметр к единице, тем выше будет эффективность использования оборудования.
Факторы, влияющие на величину КПД
Коэффициент полезного действия никогда не может быть равным единице, так как существуют неизбежные потери, снижающие полезную мощность. Они делятся на три группы:
- электрические;
- магнитные;
- механические.
Электрические потери зависят от степени нагрузки двигателя и являются следствием нагрева обмоток статора, вызванного работой тока по преодолению электрического сопротивления проводников, из которых они выполнены. Поэтому максимальный КПД электродвигателя достигается, когда нагрузка на двигатель составляет 75% от максимальной расчетной величины.
Магнитные потери происходят из-за неизбежного перемагничивания активного железа статора и ротора, а также возникновения в нем вихревых токов.
Третья группа обусловлена наличием трения в подшипниках, на которых вращается вал, а также сопротивлением, оказываемым воздухом крыльчатке вентилятора и самому ротору (якорю). Из-за наличия щеточно-коллекторного узла КПД электродвигателя постоянного тока несколько ниже коэффициента полезного действия машин с короткозамкнутым ротором. Это также относится к асинхронным электродвигателям с фазным ротором из-за дополнительного трения щеток об контактные кольца.
Способы повысить КПД двигателя
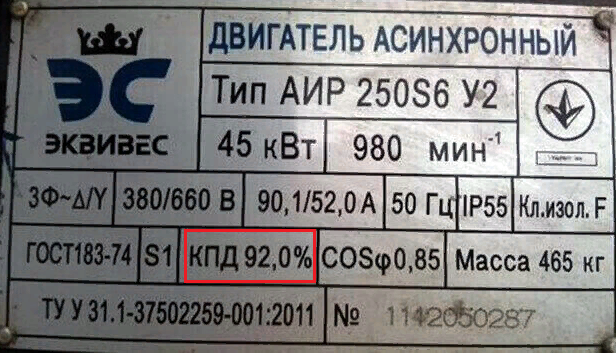
Следует помнить, что реальный коэффициент полезного действия может несколько отличатся от паспортных величин, указанных на шильдике двигателя. Чтобы выполнить расчет КПД электродвигателя в реальных условиях эксплуатации, необходимо учитывать неравномерность распределения питающего напряжения в фазах. В зависимости от величины асимметрии падение полезной мощности может достигать 5-7%.
Увеличение КПД электрической машины возможно только за счет снижения потерь и контроля качества силовой сети.
Механические потери можно уменьшить благодаря более качественным подшипникам, установки крыльчатки вентилятора, выполненной из современных материалов для уменьшения сопротивлению воздуху. Нагрев обмоток можно уменьшить благодаря использованию обмоточных проводов, выполненных из очищенной меди, имеющих меньшее сопротивление.
Снизить потери на перемагничивание активного железа и минимизировать влияние вихревых токов можно используя для набора сердечника необходимо использовать качественную электромагнитную сталь с надежной изоляцией. Кроме того, ведутся работы по разработке наилучшей геометрии зубцов статора, благодаря которым будет увеличена концентрация магнитного поля.
В реальности КПД асинхронного электродвигателя можно несколько увеличить за счет использования частотного преобразователя, позволяющего оптимизировать расход электроэнергии. Следует помнить, что эффективность эксплуатации двигателя с КПД 98% сильно упадет, если его использовать для приведения в движения механизма, имеющего более низкий коэффициент полезного действия.
Источник